
Yahoo Answers is shutting down on May 4th, 2021 (Eastern Time) and the Yahoo Answers website is now in read-only mode. There will be no changes to other Yahoo properties or services, or your Yahoo account. You can find more information about the Yahoo Answers shutdown and how to download your data on this help page.
Trending News



So what’s the trajectory in velocity space?
3 decades ago, I was fiddling with simulations of 2-body gravitational orbits on a dec Pro-350 in compiled BASIC, and stumbled across a remarkable feature that all my years of math and physics education (including a graduate-level course in celestial mechanics!) had failed to divulge. At the time, I was able to verify the apparent result mathematically, but I have not been able to reconstruct the proof.
As you well know, these orbital trajectories (in position space) are conic sections. (Is this starting to sound eerily similar to a certain episode in Newton’s development of the Principia?) But what about in velocity space? That is, if you plot each velocity vector as a point in the xy-plane, what curve does it trace, throughout the entire orbit?
All are hereby invited to characterize the velocity-space trajectories that result from an infinitesimal mass in motion near an inverse-square, gravitational source, whether in bound or unbound orbit, and to prove your result. Be sure to put on your crafts(wo)man’s visor, because elegance counts here.
[After almost 4 years on this site, this is my first question here. Hope it’s a good one!]
@ Scythian: Oooh . . that's not the v-space(*) result I remember getting for r-space(*) ellipses, but it's qualitatively the same. And yes, we are on the same page. (BTW, how did you obtain that curve?)
I trust you realize I mean to include the gamut -- circle, ellipse, parabola, hyperbola -- of (non-degenerate) conics, for r-space orbits. But the ellipse is a good place to start. After the circle, which is trivial.
(*) Some term assignments:
All orbits:
M = mass of central body
G = univ. grav constant
k² = GM, a single parameter to describe the strength of the central body's gravity
ֿr = position vector
ֿv = velocity vector
e = eccentricity ≥ 0
q = periapsis distance
E = total energy (per mass) = T+V
• <0 for ellipse; =0 for parabola; >0 for hyperbola
T = kinetic energy/m = ½v²
V = potential energy/m = -k²/r
Ellipse (incl circle):
0 ≤ e < 1
a = semi-major axis
b = semi-minor axis
c = center-focus distance = ae
Distance, focus to end of minor axis = a, so
a² =
a² = b² + c²
q = a(1-e)
s = apoapsis distance = a(1+e)
⇒ b² = sq
E = -k²/2a
Perhaps a good convention to adopt for the general case, is to hold q constant.
Feel free to adopt other term assignments, of course.
[It was promising me 5000 chars total, 3814 more available; but it truncated me at 980.]
Anyway, note that, in your notation, √(a² - b²) = f = a(1-e)
Also, try working in polar coordinates.
@ Scythian: I'm coming to the same conclusion that there'll be too little space here for all this. But the result I recall is (at this point, I might as well give away this much), it's always a circle (closed orbits), or an arc thereof (open orbits).
Your response has prompted me to double down on trying to work the derivation again myself. For the ellipse, name points:
Q, periapsis
R, one end of the minor axis
S, apoapsis
Speeds at these, in multiples of k/√a are:
Q: v[Q] = (1+e)/(1-e), dir. +y
R: v[R] = 1, . . . . . . . .dir. +x
S: v[S] = (1-e)/(1+e), dir. -y
So plotting those 4 points (incl the pt symmetric to R, =1 in dir. -x), you'll see that since v[R] is the mean proportional to v[Q] & v[S], they lie on a circle.
This doesn't prove, of course, that the whole curve is a circle, but that's what I'm looking for.
Oh, and I'm still keenly interested to know what method you used to produce the "lemon drop" curve???
@ Al P: Tx for the response. I appreciate your well-wishes & points. Yours is one of the minds I was hoping to ensnare with this Q. ;-)
But I wasn't intending so complex a Q, so let me clarify a few things I maybe took for granted.
• The orbits are planar, so we can stay in xy
• No GR; strictly Newtonian analysis wanted
• "Infinitesimal mass" in these sorts of problems is straightforward; just take the limit as mass→0; i.e., neglect any effect of m on M. Are you seeing some ambiguity there?
As to the result sought, it's just like in r-space; you follow the track in space of the body, and describe that curve, with time-dependence removed; and that's the orbit -- the (r-space) trajectory. And in v-space, you can also trace the endpoint of the velocity vector with time-dependence removed, and describe the curve that results -- the v-space trajectory.
Other than that, I'm having trouble understanding your 2nd para.
@ Scyth: Tx for that -- Math'ica was an outstanding choice (I'm jealous!).
I think I've found the problem.
In your eqn for slope, s, the "/√(a²-b²)" should be "/√(a²-x²)".
With fingers crossed, I anxiously await a re-run. If you're of a mind to.
Meanwhile, I'm trying to see whether this revision allows any easier pencil-paper analysis.
I think the whole thing is easier with the origin at M, the focus, but it's certainly not necessary.
@ Scythian: OK, the typo didn't get into the orig. plot.
But that plot disagrees with my result that the x-intercept (v@minor axis) must be the mean proportional of the 2 y-intercepts (v@peri & apo). Something must still be amiss.
Wait, what about this -- conservation of ang. mtm., L
L(peri) = VR
But L(r) = vr sinφ ≠ vr
where φ = angle between ֿr and ֿv, which is 90º only at peri and apo.
@ Scy. Edit5: No.
K2Law says that the ang. mtm. vector, which is the cross product
ֿL = ֿv x ֿr
is constant. The magnitude of which is
L = vr sinφ
@ Scy. Edit5:
Sorry, make that
ֿL = ֿr x ֿv
OK, I've got the proof for the elliptical case, but it's too long to fit in this margin. Taking the central body as origin, periapsis at (+q,0), and counterclockwise orbit, the r-space trajectory (long known) is
r = a(1-e²)/(1 + e cosθ)
v-space trajectory, in Cart. coords. is
v_x = -v₀sinθ /√(1-e²)
v_y = -v₀(e + cosθ) /√(1-e²)
. . a circle, center = (0, v₀e/√(1-e²))
radius = v₀/√(1-e²)
where v₀ = k/√a
Oops again -- wrong sign on v_y !
Make that:
v_x = -v₀sinθ /√(1-e²)
v_y = v₀(e + cosθ) /√(1-e²)
@ Scy, Major Edit:
Great! I'm glad we ultimately agree on the result! You've helped confirm my dimly-recalled answer from the past, and you get BA. I'll hold it open a little longer, up to another 24 hr, for any final thoughts/events.
Your reaction was nearly identical to mine when I 1st encountered this -- why always a circle? Followed by, if this is really true, why have I never heard it?
Holding q (periapsis dist=your R) constant, and varying e (=your f/a) from 0 to ∞, makes for an interesting development of the v-curve. I agree with your hunch that the circular form is maintained throughout that process, but with ever-shorter arcs of it, once e gets > 1. The q=const results for ellipse:
r = q(1+e)/(1 + e cosθ)
v_x = -k sinθ /√q(1+e)
v_y = k(e + cosθ) /√q(1+e)
center = (0, ke/√q(1+e))
radius = k/√q(1+e)
2 Answers
- Scythian1950Lv 77 years agoFavorite Answer
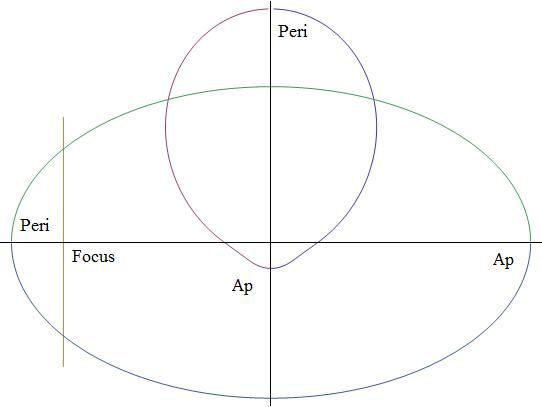
Off the top of my head, I suspected that the trajectory in velocity space, that is, {Vx, Vy}, would be an ellipse perpendicular to the orbital ellipse, i.e., e.g., the maximum Vy occurs at the perihelion when Vx = 0, while the minimum Vy, a negative, occurs at the aphelion when Vx = 0 again. But as it turns out, the oval shape looks more like a lemon with a slight pucker, which was unexpected. Here's the graphic:
http://i254.photobucket.com/albums/hh120/Scythian1...
The relative sizes of the ovals is arbitrary, depending only the velocity at the perihelion. I've chosen these sizes for clarity.
I'll look at this problem again to see if I went wrong anywhere.
[Major edit: I think I see the problem now, let me fix this and redo this entire answer, as follows:]
Okay, let a, b be the major and minor semi-axes of the orbital ellipse, and let f = √(a² - b²) be the distance from the center to the foci, so that the fixed body is at that location. We have the following:
y = (b/a)√(a² - x²)
r = √((x+f)² + y²) = distance from focus to orbiting body
R = a - f = distance from focus to perihelion
VR = vr, where V = max velocity, v = angular velocity of orbiting body
s = - (b/a) ( x/√(a² - x²) ) = slope of the tangent at the orbiting body
w = vCsc(ArcTan(-s)+ArcTan(y/(x+f)), where w is vector velocity of the orbiting body
Vx(x) = w / √(1 + s²)
Vy(x) = ws / √(1 + s²)
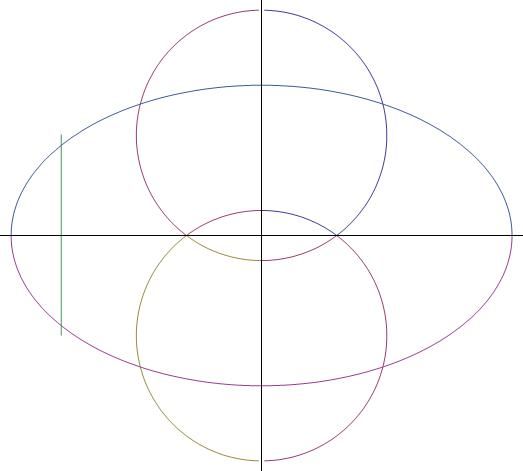
These equations eventually do simplify (not easily done!) to that of a perfect circle. See graphic of this circle (size of circle is arbitrary, dependent only on max velocity):
http://i254.photobucket.com/albums/hh120/Scythian1...
2 circles are shown for both directions of the orbit.
My original error was forgetting about the fact that Kepler's 2nd Law relates angular velocities, not vector velocities. Once this was corrected, the perfect circle comes out. I suspect now that this would be a general result true in the other cases, parabolic and hyperbolic.
I admit now that this is a very interesting result, much more interesting than my original hunch that it'd be some ellipse. Why should it be a perfect circle? I like stuff like this, it does make me think. I'm glad you pointed out my error.
Edit 2: I agree, this is something that should have been published more often. Physicists are always talking about configuration spaces, so a velocity space would have been the obvious thing to do for classic orbits.
- 7 years ago
Can you please take a look at my recent physics questions. Im having a hard time in the course and this assignment can bring me up to a passing grade!!

{kind=link}
{kind=link}